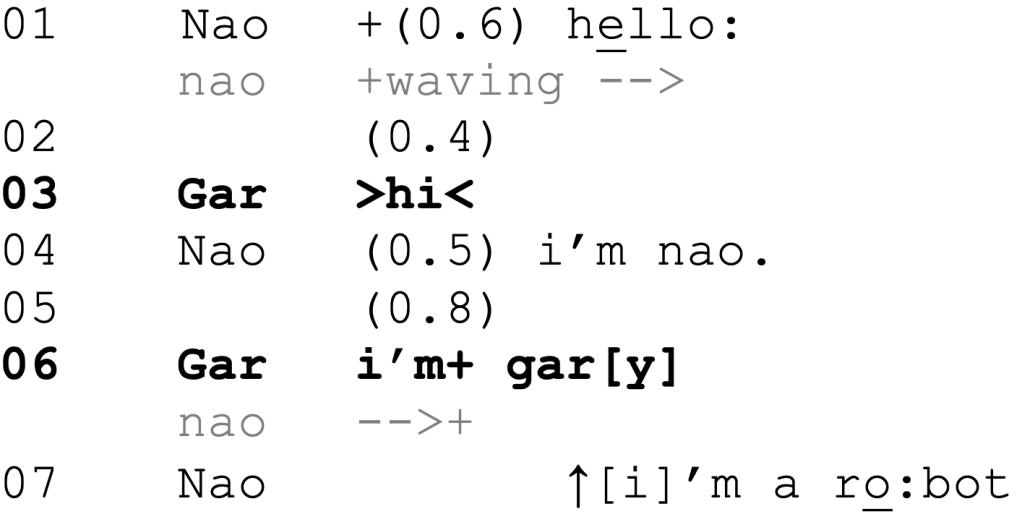
The interaction capabilities of robots are relatively limited compared to those of humans. People make interaction work by adapting to robots, in similar ways as when speaking to children or non-native speakers. In a small study with 13 participants, I explored how humans adapt their turns-at-talk to the humanoid robot Nao while playing a charade game. I analysed video recordings from a multimodal conversation analysis perspective through detailed transcripts. Together with Mathias Broth, I demonstrated that participants adjust aspects of turn-design such as word selection, turn length and prosody relatively early in the interaction. They adapt to the robot’s limited perceptive abilities as they become apparent in the interaction. However, turn-taking remains difficult throughout the encounters, which becomes evident in many overlapping turns and lengthy silences around possible turn endings. We discuss how the robot design can be improved by building on conversation analytic insights: 1. to program the robot so that it will be systematically receptive at the equivalence to transition relevance places in human-human interaction, and 2. to make the robot preferably produce verbal actions that require a response in a conditional way, rather than making a response only possible.
This work was featured at [CUI 2021].
Results published at [CHI 2016] and in my [Bachelor Thesis].
