I take an ethnomethodology and conversation analysis (EMCA) perspective on human-robot interaction (HRI). Most of my work involves studies in the world, i.e. in real-world settings, capturing everyday interaction through video recordings. My current projects involve following delivery robots as they pass through cities, and studying the work of robot operators.
My research contributes
- an empirical understanding of how humans support robot autonomy in practice
- methods for designing robots that can coordinate with humans
- interactional and embodied theories of human sociality and machine intelligence
I have studied everyday interaction with Starship delivery robots, EasyMile and Navya autonomous shuttle buses, the DaVinci Surgical System and Anki’s Cozmo toy robot. I continue to develop interaction design methods that explore sound and motion as a communicative resources for robots. Conceptually, I am exploring how agency, autonomy and control are practically accomplished in situated interaction.
Empirical studies of human-robot interaction





Methods for bridging interaction analysis and design
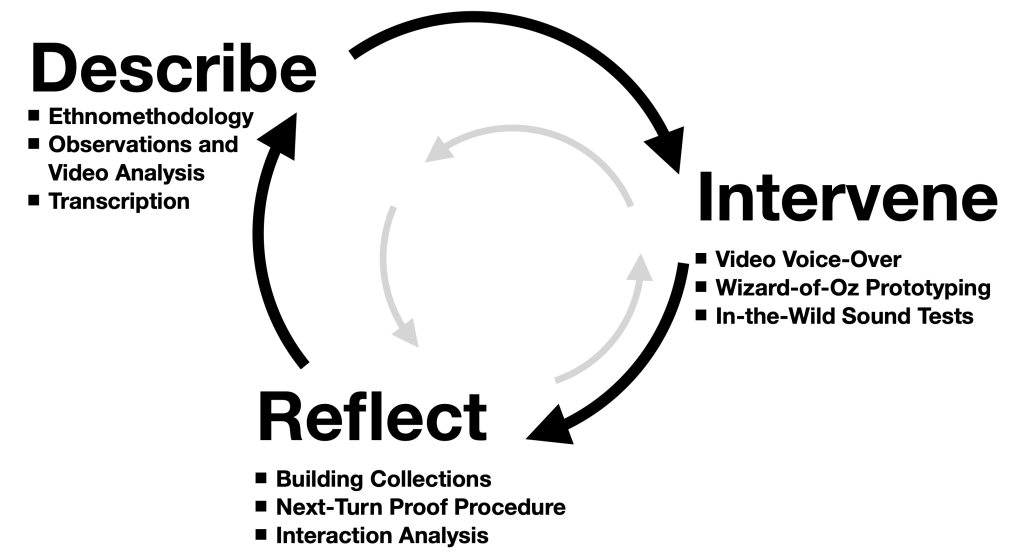
Originally developed for sound design, the Describe-Intervene-Reflect (DIR) framework provides a methodological basis for navigating methodological jumps between scrutinising real-world interaction and brainstorming possible future interactions.
Conceptual frameworks for making sense of autonomous systems in society
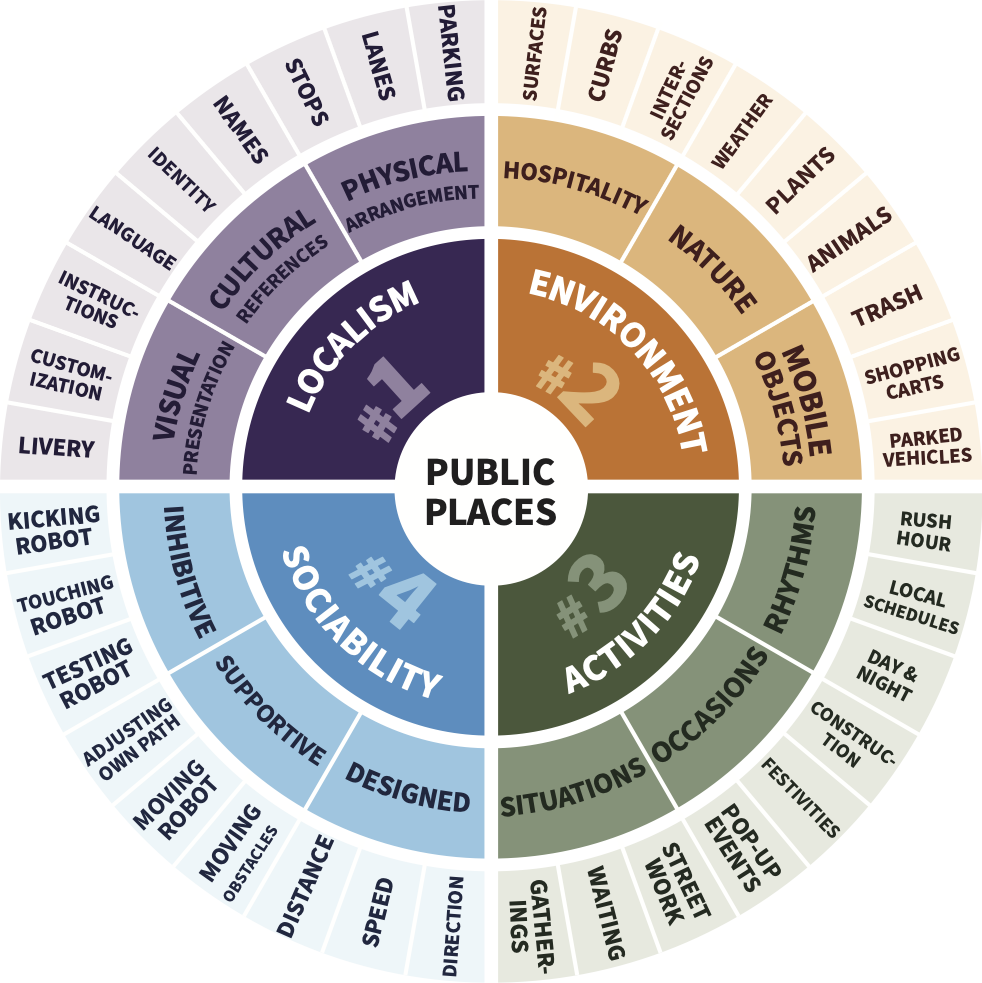
The Robots in Public Places framework takes inspiration from William H. Whyte’s video-based studies of urban life and the social use of public space. Grounded in our own video-ethnographic studies of robots in public settings, we provide examples of (1) how robots can be embedded into specific local contexts, (2) how local environments and (3) human activities impact robot operation, as well as (4) how people on the street encounter robots.
